EtherCAT#
This module describes overview of EtherCAT Subdevice offering from TI
EtherCAT (Ethernet for Control Automation Technology) is a real-time industrial Ethernet standard for industrial automation applications, such as input/output (I/O) devices, sensors and programmable logic controllers (PLCs). It was originally developed by Beckhoff Automation GmbH but is now overseen by the EtherCAT Technology Group that was set up to help with proliferation of the EtherCAT standard. EtherCAT technology adds certain features on Ethernet and enforces certain configurations to make it a very efficient network technology for automation while fully conforming to the Ethernet specifications.
The design of EtherCAT enables any standard PC to be used as an EtherCAT main and communicate with EtherCAT subordinates, which are specialized devices compliant with the EtherCAT specification. Together, the main and subordinate EtherCAT devices can be used in all devices in the factory network – automation controllers, operator interfaces, remote input/output units, sensors, actuators, drives and others.
Peripherals and Components#
The AM263x enables EtherCAT Subordinate functionality through PRU-ICSS:
Programmable Real-Time Unit and Industrial Communication Subsystem (PRU-ICSS): PRU-ICSS is firmware programmable and can take on various personalities like Industrial Communication Protocol Switch (for protocols like EtherCAT, Profinet, EtherNet/IP), Ethernet Switch, Ethernet MAC, Industrial Drives, etc.
Note
PRU-ICSS supports MII mode only.
Drivers and HAL#
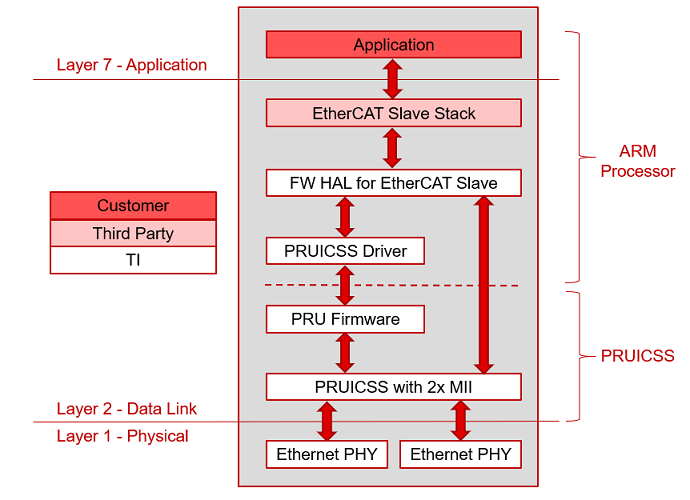
EtherCAT SubDevice FWHAL
EtherCAT SubDevice FWHAL is designed for the TI SoCs with PRU-ICSS IP to enable customers add EtherCAT SubDevice protocol support to their system. It implements EtherCAT SubDevice Controller(ESC) Layer 2 functionality with two MII ports (one IN and one OUT port per PRU-ICSS) in accordance with ETG.1000.4 Data Link Layer protocol specification. EtherCAT firmware for PRU-ICSS is a black box product maintained by TI. EtherCAT SubDevice FWHAL(Firmware and Hardware Abstraction Layer) allows loading and running the EtherCAT firmware and acts as an interface with ESC firmware. FWHAL implements the key interface between EtherCAT SubDevice Controller Emulation firmware and EtherCAT stack. This provides EtherCAT ASIC like functionality integrated into TI SoCs. You can read more about it here: EtherCAT SubDevice FWHAL
Protocol stacks and Middleware#
It is necessary to get the EtherCAT SubDevice Stack Code (SSC) to evaluate the offering.You can download the same from ETG website EtherCAT Subdevice Stack Code
Note
Please check the correct EtherCAT stack version required before downloading. Requirements
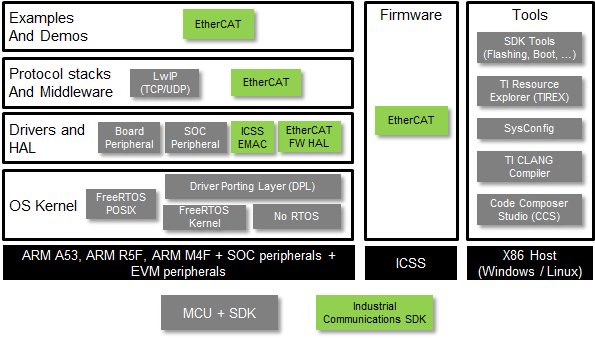
Software SDK block diagram#
Below is the software components overview highlighting mainly the components used in the EtherCAT SubDevice software development.
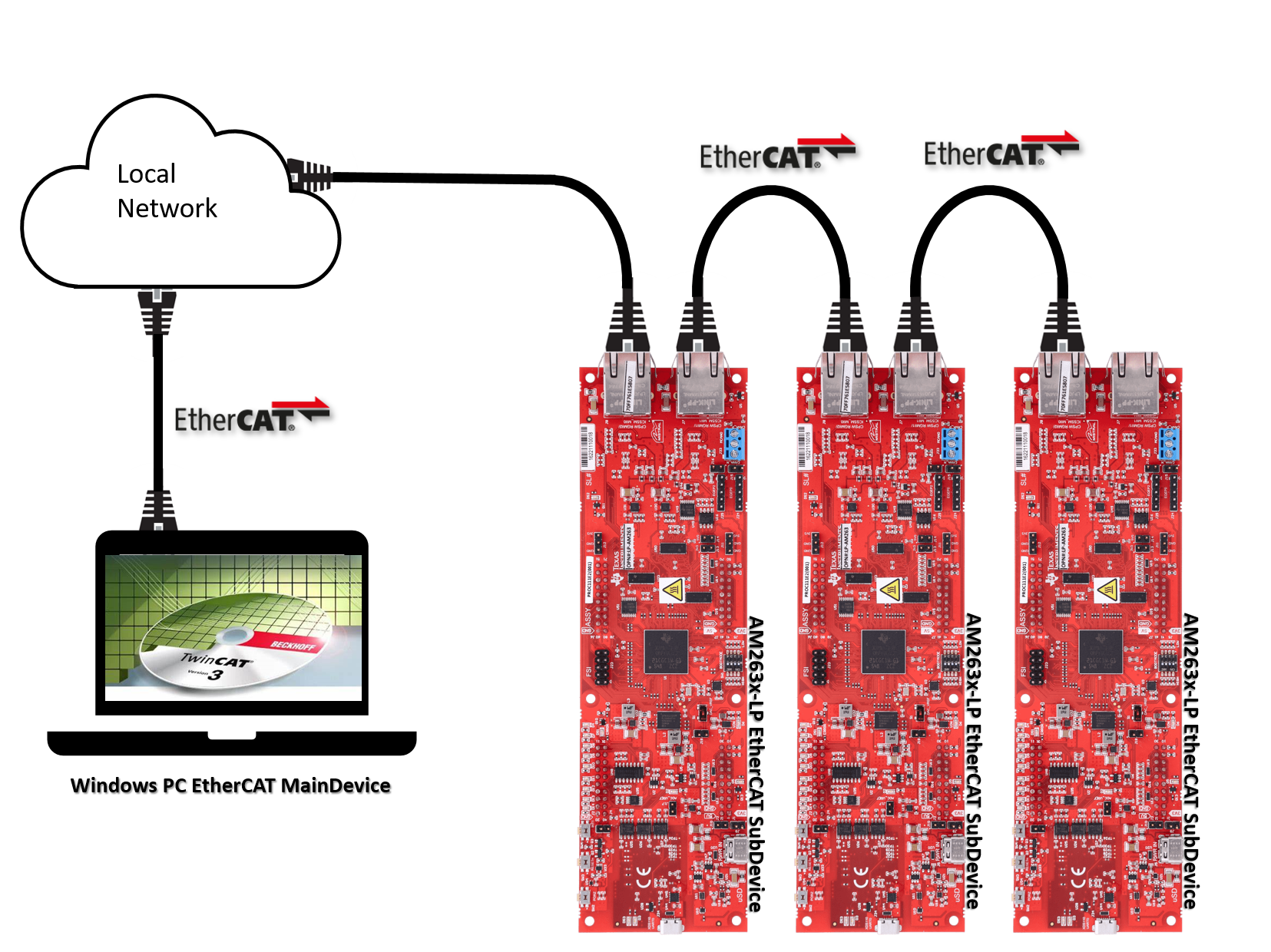
Test environment example diagram#
What you will need#
Note
Please check the correct version of tool required before downloading. Requirements
Hardware#
EtherCAT subordinate#
Windows or Linux PC
EtherCAT main#
Windows PC
Software#
EtherCAT subordinate#
EtherCAT main#
Setting up and running the EtherCAT subordinate#
Note
Before proceeding to next step please make sure to setup your am263x-cc/am263-lp as mentioned in the getting started page. Getting Started
Setup your AM263x as the EtherCAT Subordinate using the EtherCAT SubDevice Beckhoff SSC Demo as described in the below docs:
Setting up and running the EtherCAT main#
There are multiple option for EtherCAT MainDevice to select from. For demonstration we have picked up two TwinCAT and Codesys
Setup the TwinCAT EtherCAT MainDevice on Windows PC by following these steps in the docs: Connect to PLC - TwinCAT3
Setup the AM64x EtherCAT Main by following these steps: Connect to PLC - CODESYS - AM64x Starter Kit EVM Quick Start Guide - AM64x General Purpose EVM Quick Start Guide
See also#
TI EtherCAT SubDevice Controller Register List contains descriptions of the registers in TI’s EtherCAT SubDevice Controller implementation.
TI EtherCAT SubDevice Controller Exceptions contains lists the exceptions TI’s EtherCAT SubDevice Controller implementation when compared with ET1100 ASIC.
EtherCAT documents by ETG
For further information on industrial protocols available on Sitara processors and MCUs and how they can be enabled on your production project, see:
Industrial Communication Protocols Supported on Sitara™ Processors and MCUs Application Note
Was this helpful? Let us know here: https://e2e.ti.com/